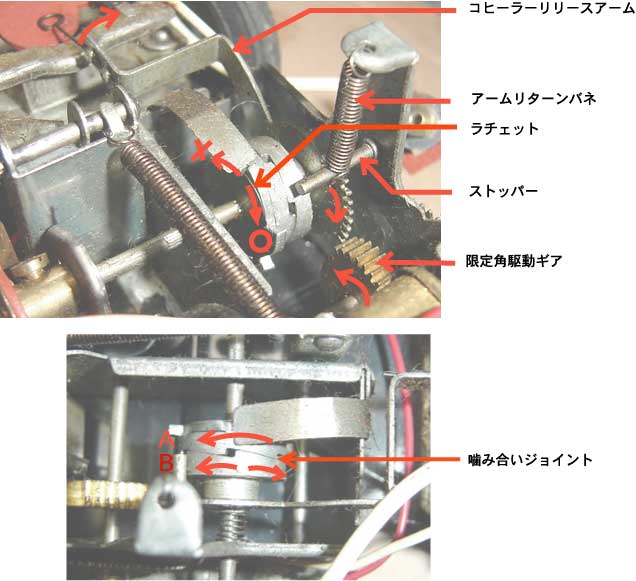
(1)送信機のボタンを1回押すと「コヒーラー」が導通状態となり、リレーがとじ、サーボの駆動用モーターが回転をはじめます。モーターの回転は減速用ギアを介して、図の「限定角駆動ギア」を回転させます。ここで、限定角は約60度です。(この角度以外の部分はギアの歯が削り取られています)これと噛み合う「コヒーラーリリースアーム」には、同数の歯数のギアが取り付けられており、図の矢印の方向に回転します。
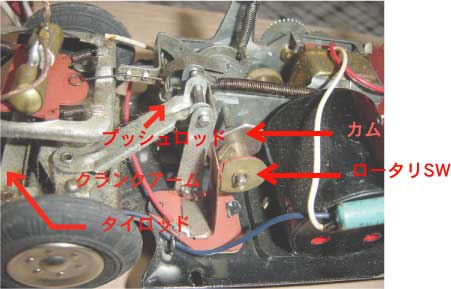
(2)ギアの回転は「噛み合いジョイント」を介して、ラチェットを矢印の方向に回転させ60度分回転(1/6回転)します。ところで、ラチェットは○印の方向には回転しますが、×印の方向にはストッパーがついているので回転できません。ラチェットの取り付けられているシャフトにはさらにカムが取り付けられており、前輪のかじ取り装置(タイロッド)を駆動します。また、同じ軸には、回転スイッチ板が取り付けられていて、6ポジションのうち、停止位置を除きすべてスイッチが導通するように働きます。(停止以外ではずっと走行用モーターは回転を続ける)
{kind=link}
(3)(1)の「限定角駆動ギア」の回転は約60度を過ぎても回転し続けます。すると、このギアに噛み合う「コヒーラーリリースアーム」のギアは噛み合う相手がなくなり、「リターンバネ」の力により、先ほどとは逆の方向に戻りはじめます。この時、「噛み合いジョイント」のA側はラチェットと直結しているため、ラチェットと同じく、×方向には回転できません。しかし、「噛み合いジョイント」のB側は両方向に回転できるように、噛み合いの山を乗り越え、B側を押し下げて1歯分回転できるようになっています。したがって、「コヒーラーリリースアーム」はバネの力でストッパーの位置まで急速に戻ります。同時に、アームの先に取り付けられているピアノ線のリングが「コヒーラー」取り付け台をたたきます。
(4)(3)のアームの衝撃により、コヒーラーは導通状態をリリースされ、絶縁状態になり、回路が切れます。これで、コヒーラーは初期状態に復帰し、モーターは停止します。以上の一連の動作により、送信機のボタンを1回押す度にサーボは正確に60度ずつ回転し、停止→直進→右→直進→左→直進を順にくり返すことができます。